JNER:机器人辅助评估中风后的手本体感觉、运动和感觉损伤
时间:2021-10-29 10:02:00 热度:37.1℃ 作者:网络
对于手来说,身体感觉和运动功能以及两者之间的相互作用对于在日常生活活动(ADL)中进行灵巧和熟练的动作至关重要。例如,当抓取一个小物体时,本体感觉是感知肢体当前位置所必需的。这种感觉输入随后被中枢神经系统整合,形成运动输出,这一过程称为感觉运动整合。中风等神经损伤通常会破坏这一过程的特定方面,从而阻止患者进行ADL。
80%的中风幸存者患有轻瘫。然而,一些似乎源于运动功能损害的活动限制可能是由本体感觉反馈受到干扰引起的。现有的临床评估仅提供损伤的整体测量(例如Fugl-Meyer上肢评估),需要进行多项评估以全面评估感觉运动损伤情况,因此在整个康复过程中很少定期进行评估。机器人辅助的方法是客观的(不依赖于观察者的判断)、准确的(例如,能够测量准确的身体位置/施加的力),以及能够提供精确、可重复的刺激(例如,评估感觉功能或痉挛])。

此外,通过多个机器人辅助评估任务,可以用一个设备评估不同的损伤,这将导致对损伤的时间效率和更全面的概述。这也允许以标准化的方式相互比较不同的损伤模式(如运动和感觉),从而有可能为上肢损伤情况提供新的见解。尽管它们很有希望,但现有的机器人方法旨在同时对手进行感觉和运动评估,仍处于起步阶段。到目前为止,提出的方法侧重于上肢近端关节,包括仅针对特定损伤模式的任务(例如本体感觉,不可能同时评估运动损伤),或未能提供其结果测量的临床特性的详细评估(信度、测量误差、效度)。 而同时效度的研究对于将新的技术方法与普遍接受的评估方法联系起来非常重要。目前缺乏对目标人群的可靠性和有效性的标准化评估,使得新的评估技术不太可能被临床接受并应用于研究项目之外。
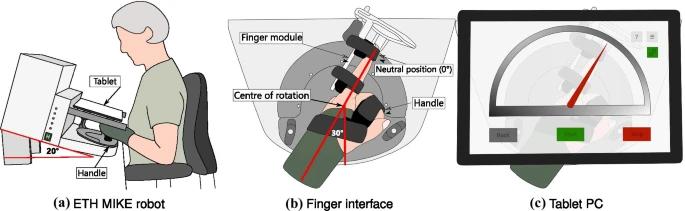
这项工作的目的是提出并评估一套新的手本体感觉、运动和感觉运动损伤评估方法,该方法在先前描述的单个机器人平台上实施(ETH MIKE:运动损伤和动觉评估)这种单自由度末端执行器装置可以为食指掌指(MCP)关节提供良好控制的运动刺激,并灵敏地测量其运动学和动力学响应。本文发表在《神经病学,神经外科学和精神病学杂志》上(Journal of Neurology, Neurosurgery & Psychiatry)。

在一个作用于食指掌指关节的单自由度末端执行器机器人平台上进行了一组五项补充评估任务。具体而言,使用位置匹配范式评估本体感觉损伤。快速到达目标、运动范围和最大指尖力量任务是运动功能缺陷的特征。最后,使用灵巧轨迹跟踪任务评估感觉运动损伤。临床可行性(持续时间)、信度(类内相关系数ICC、最小实际差异SRD)和效度(Kruskal-Wallis检验、Spearman相关系数ρ与Fugl-Meyer上肢运动评估、动觉上下测试、框块测试)对36名亚急性中风受试者和31名年龄匹配的神经系统完好对照者进行了机器人任务评估。
83%不同损伤严重程度(轻度至重度)的中风患者能够完成所有机器人任务(每只受试手持续时间<15分钟)。此外,该研究还证明了中风人群中机器人任务的良好至卓越的可靠性(ICC>0.7,SRD<30%),以及判别效度,如中风和对照受试者之间存在显著差异(p值<0.001)。同时有效性通过机器人结果测量和临床量表之间的中到强相关性(ρ=0.4-0.8)来显示。不同缺陷(运动、感觉)的机器人任务之间没有强相关性(ρ≤0.32)。
机器人平台示意图
新提出的机器人辅助评估是可靠的,没有显示出强烈的测量误差。证明本体感觉评估(测量位置匹配任务)的可靠性是一项重要贡献,因为使用传统方法或机器人方法可靠地评估神经系统患者的本体感觉手损伤是一项长期的挑战。当每个角度仅采样一次时,获得了良好的可靠性,从而缩短了总体评估时间,从而有助于临床可行性。角度大小对位置匹配误差的影响,与之前的研究一致,对于所有测量都是一致的,因此不会影响可靠性。

评估本体感觉损伤的量表及结果
运动和感觉运动任务获得的可靠性结果与文献中先前报告的结果一致(ICC 0.7-0.9,质量指标),尽管直接比较这些结果很困难,因为一些研究是针对对照受试者而非目标人群进行的。与传统临床评估相比,建议的机器人评估通常会导致更高的测量误差(例如FMA 10%,我们的机器人评估介于15%和25%之间)。这可以部分解释为机器人方法的精确传感能力,它在检测行为变异性方面比临床尺度更敏感。所有机器人辅助评估中,与年龄匹配的对照组相比,中风受试者受影响最严重一侧的表现明显较差。这证实了机器人指标可以捕捉到与特定卒中后损伤相关的任务表现异常。此外,在受试者基础上提供关于现有损伤的信息具有临床相关性。从被归类为受损的受试者的百分比来看,本文发现并非所有中风受试者的得分都比对照组差,这取决于中风患者的受损情况。
各类别任务的结果测量(即本体感觉、运动、感觉运动评估)与其相应的临床分数之间存在中度至高度显著相关性,这表明机器人测量系统捕捉特定损伤的能力。更详细地说,在位置匹配绝对误差和kUDT之间发现了中度显著相关性,证实了该机器人任务能够评估本体感觉缺陷。这一机器人测量与FMA(仅运动部分,因为未实施FMA的感觉部分)不相关的事实表明,该任务可能能够独立于运动损伤评估本体感觉。此外,最大力、主动运动范围以及最大速度与FMA呈强显著相关性,而与库特无显著相关性。因此,这些机器人任务可能反映了基本运动执行的损伤。
本文提出的机器人辅助评估提供了一种临床上可行、可靠和有效的方法,以明确描述手本体感觉和运动功能的损伤,以及两者之间的相互作用。这开辟了新的途径,有助于揭示感觉运动功能独特方面在卒中后恢复中的作用,并有助于未来个性化疗法的发展。
Zbytniewska, M., Kanzler, C.M., Jordan, L. et al. Reliable and valid robot-assisted assessments of hand proprioceptive, motor and sensorimotor impairments after stroke. J NeuroEngineering Rehabil 18, 115 (2021). https://doi.org/10.1186/s12984-021-00904-5

