Foot Ankle Int:渐进式三角韧带切断术对Weber B型踝关节骨折稳定性的影响
时间:2023-09-24 08:15:33 热度:37.1℃ 作者:网络
 不稳定Weber B/Lauge Hansen旋后-外旋(SER)踝关节骨折的诊断是很重要的,以便选择正确的治疗并减少并发症的风险,如踝关节创伤后骨关节炎(PTOA)。完整的三角韧带可以防止不稳定,即使是腓骨骨折,也就是所谓的SER2骨折。传统上,所有有影像学和临床不稳定症状的骨折都采用手术治疗。然而,最近的临床研究表明,如果在负重位拍摄x线片,这些骨折可能会出现正常的关节排列,因此可以认为是稳定的。有人认为这些骨折被称为SER4a骨折;非手术治疗后,短期和中期的临床和功能结果均可接受。然而,SER4a骨折非手术治疗的主要问题是长期发生隐匿性不稳定导致上睑下垂的风险。本研究建立在Gougoulias和Sakellariou的理论基础上,该理论主张SER4a骨折中浅层和深前三角韧带受损,而深后三角韧带完好无损。从生物力学的角度来看,三角韧带的表面成分与距骨本身没有附着。
不稳定Weber B/Lauge Hansen旋后-外旋(SER)踝关节骨折的诊断是很重要的,以便选择正确的治疗并减少并发症的风险,如踝关节创伤后骨关节炎(PTOA)。完整的三角韧带可以防止不稳定,即使是腓骨骨折,也就是所谓的SER2骨折。传统上,所有有影像学和临床不稳定症状的骨折都采用手术治疗。然而,最近的临床研究表明,如果在负重位拍摄x线片,这些骨折可能会出现正常的关节排列,因此可以认为是稳定的。有人认为这些骨折被称为SER4a骨折;非手术治疗后,短期和中期的临床和功能结果均可接受。然而,SER4a骨折非手术治疗的主要问题是长期发生隐匿性不稳定导致上睑下垂的风险。本研究建立在Gougoulias和Sakellariou的理论基础上,该理论主张SER4a骨折中浅层和深前三角韧带受损,而深后三角韧带完好无损。从生物力学的角度来看,三角韧带的表面成分与距骨本身没有附着。
因此,它们对稳定距骨在榫槽中的作用并不直接重要。相反,深前和深后三角韧带是距骨的关键稳定剂,因为它们起源于内踝并附着于距骨的内侧体。深前韧带在跖屈时紧绷,而在跖屈时通过背屈时松脱。后深韧带的情况正好相反。这也许可以解释为什么放射稳定性指标可以根据脚踝的位置而改变。在SER4a骨折的x线摄影应力测试中观察到不稳定的可能原因可能是在应力x线摄影获取时踝关节跖屈,这是一个完整的深后韧带自然不接合的位置,导致出现不稳定的榫眼。相反,在负重体位,踝关节位置更中立时,深后韧带将被接合,因此通过保持距骨与胫骨关节面正常一致来稳定踝关节。
由于SER2、SER4a和SER4b理论的生物力学支持很少,本研究旨在探讨经韧带联合腓骨骨折无、部分和全部三角韧带损伤与天然踝关节的生物力学影响。假设SER2和SER4a模型的距移和外翻倾斜与天然关节相比是稳定的,但与SER4b模型相比是不稳定的。
方法:采用工业机器人对15具尸体踝关节标本进行检测。所有标本在4种状态下进行检测:原生模型、SER2模型、SER4a模型和SER4b模型。踝关节稳定性测量了3个距侧关节位置(20度跖屈、中性和10度背屈)的外侧平移、外翻和内外旋转应力。用透视法测量距骨关节的距骨移位和距骨外翻倾斜。

机器人在试样上执行外翻试验的实际试验装置

描述斜骨、经骨联合腓骨截骨术是如何进行的

SER4a模型内侧视图显示完整的胫后深韧带。前三角肌浅韧带和前三角肌深韧带被切除
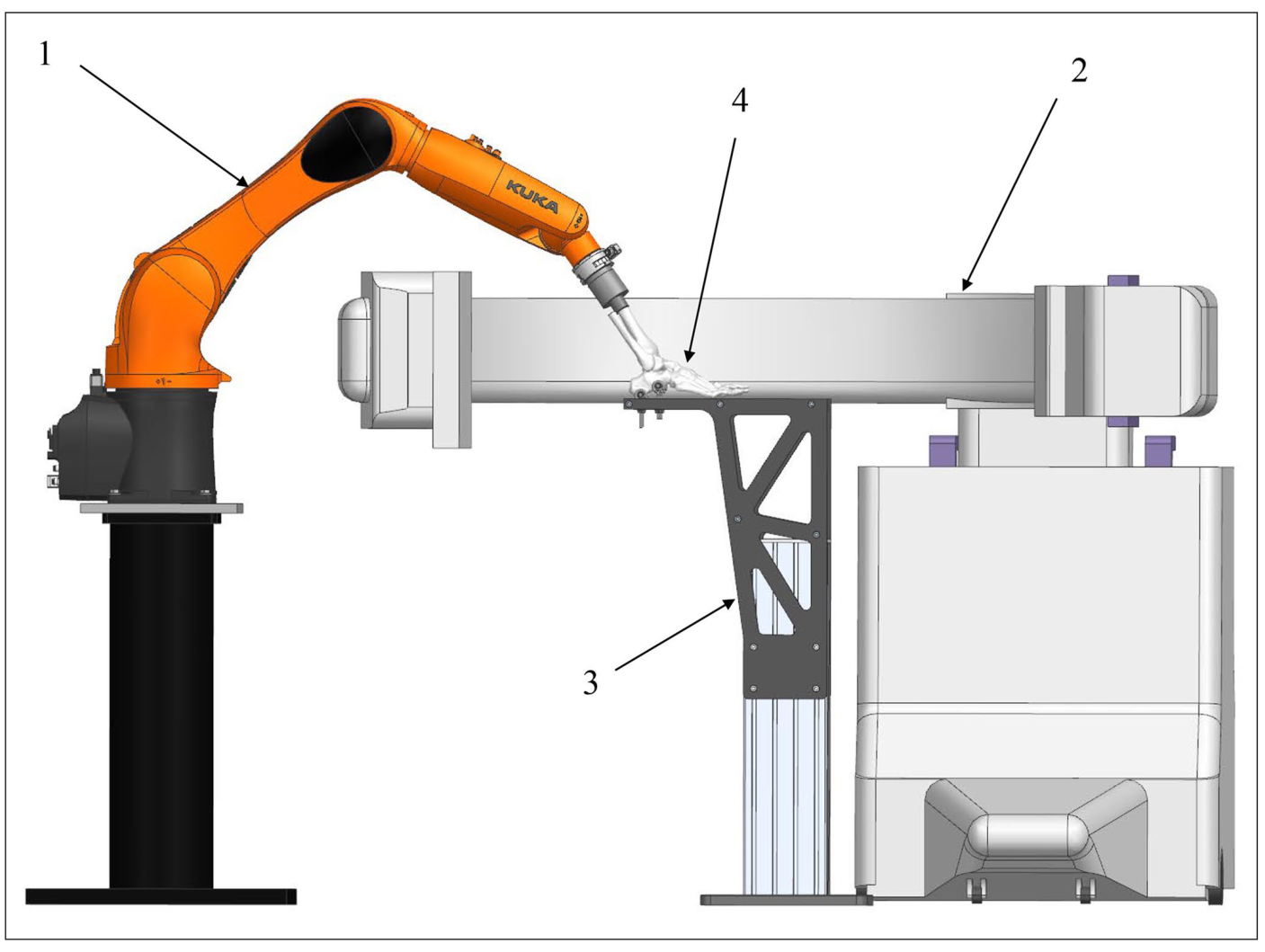
踝关节稳定性测试的实验装置示意图,包括机器人(箭头1)、c型臂(箭头2)、固定平台(箭头3)和踝关节尸体标本(箭头4)。

15个踝关节标本依次作为原生、SER2、SER4a和SER4b模型进行横向平移和外翻测试的生物力学稳定性测量。图中显示了SER4a和SER4b模型踝关节稳定性的显著差异。标记表示平均值,而阴影区域表示平均值的95% CI。带阴影的蓝色圆形标记代表机器人对整个踝关节的测量,包括距骨和距下关节。黄色菱形标记和阴影代表x线摄影测量,距骨位移测量为内侧间隙(MCS),用于横向平移,距骨倾斜测量为外翻。

15个踝关节标本依次作为原生、SER2、SER4a和SER4b模型进行内、外旋转的生物力学稳定性测量。图中显示了SER4a和SER4b模型内旋踝关节稳定性的显著差异(虚线)。然而,对于外旋,所有损伤状态都是不稳定的。标记表示平均值,阴影区域表示平均值的95% CI。所有的测量都是用机器人完成的。
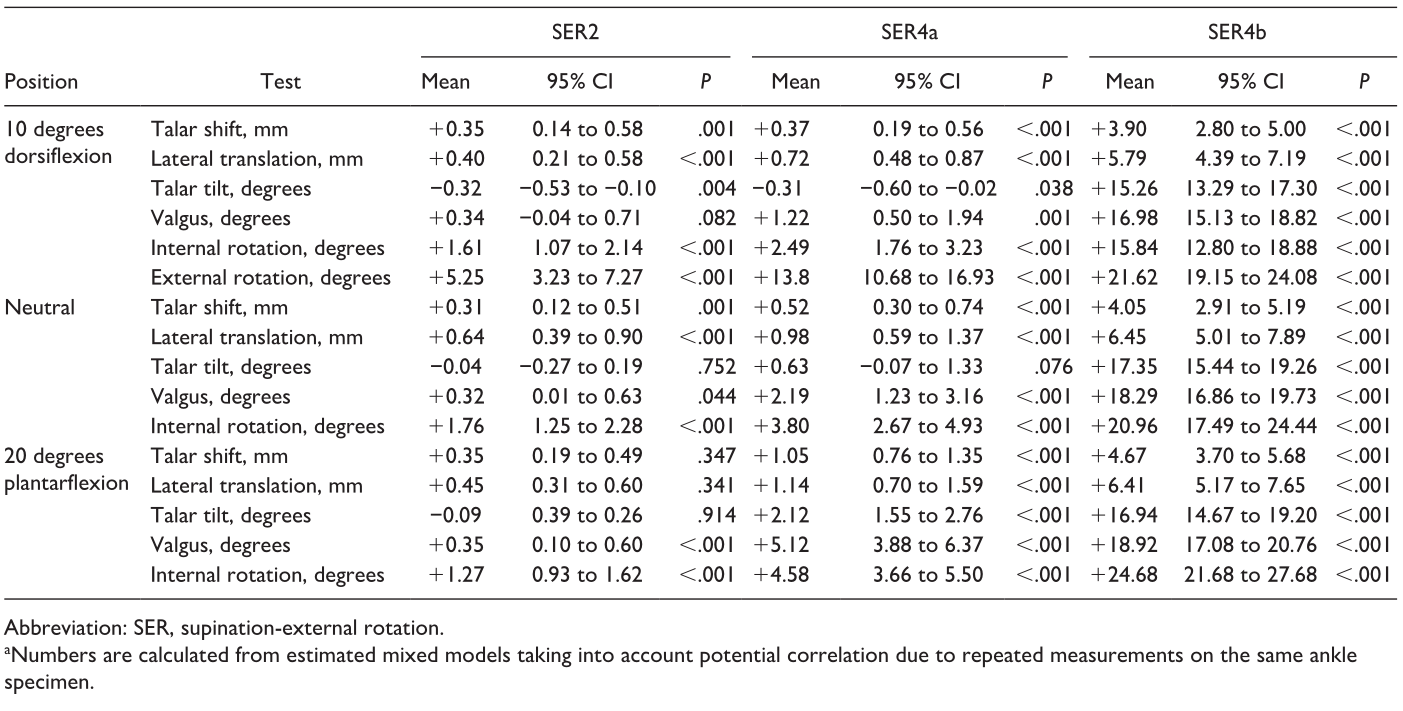
15种SER2-4b损伤模型与天然踝关节稳定性的平均差异

15个踝关节的稳定性测量依次作为原生、SER2-、SER4a-和SER4b模型进行测试。数字是简单的平均值和标准差,对应于图5和图6中报告的平均值。

