MIT最新研究:将社会心理学引入机器学习自动驾驶车辆能够判断司机驾驶习惯
时间:2019-11-19 17:30:21 热度:37.1℃ 作者:网络
车东西(公众号:chedongxi)
文|Juice
车东西11月19日消息,据外媒venturebeat报道,麻省理工学院计算机科学与人工智能实验室的研究人员利用社会心理学对自动驾驶系统进行训练,自动驾驶系统会区分司机驾驶行为并预测驾驶员的驾驶习惯,车辆依据驾驶员的驾驶习惯进行并道或左转弯。
研究团队借鉴了博弈论和社会价值取向的心理学概念,对驾驶场景进行建模,在这个场景中,机器通过车辆的运动路径判断人类驾驶员的驾驶方式,然后能够更好地预测人类驾驶员在合并车道或进行无保护的左转弯时的驾驶行为。据统计,通过这项研究,自动驾驶车辆并道和左转弯的准确性比以前提高了25%。
研究人员也表示,他们的这项研究目前还不够完善,无法在公共道路上进行推广,但他们计划扩大研究对象规模,将道路中的行人、自行车等都纳入研究中,让自动驾驶系统能够对人类的行为产生预判。
一、将社会学引入机器学习车辆并道左转弯的准确率提升25%
首席研究员Wilko Schwarting在一份声明中表示,为了保障乘客和周围其他的车辆更加安全,需要让自动驾驶汽车更像人类,这样行人就可以预测自动驾驶汽车的驾驶方式,并且能对其作出反应。
▲自动驾驶并道示意图
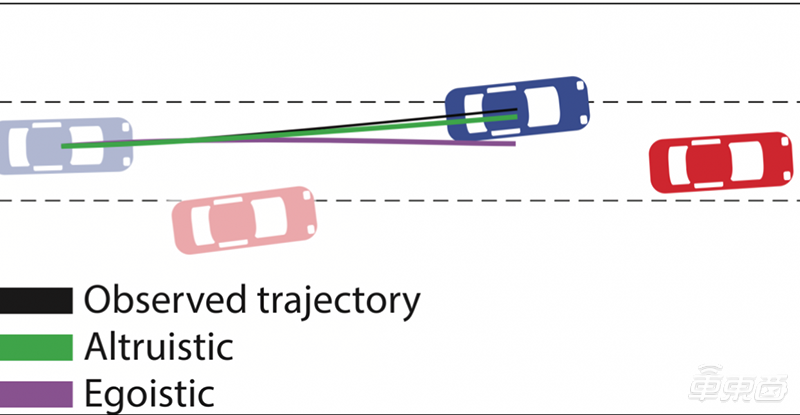
研究团队借鉴了博弈论和社会价值取向的心理学概念,他们将驾驶场景进行了建模,在这个场景中,机器通过车辆的运动路径判断人类驾驶员的驾驶方式,然后能够更好地预测人类驾驶员在合并车道或进行无保护的左转弯时的行为。久而久之,机器就能够明白什么时候应该采取何种驾驶行为。
▲自动驾驶车辆准确进行左转弯
例如,在涉及合流和左转的场景中,驾驶员要么让其他车辆合流到车道中,要么不让其他车辆进行合流。自动驾驶汽车在掌握了前后驾驶员的驾驶习惯后,可在拥挤的交通中改变车道。而在进行左转弯时,自动驾驶汽车会分析迎面车辆驾驶员的驾驶习惯,选择合适的时机进行左转。
该研究团队表示,通过他们的算法,车辆并道和左转弯的准确性提升了25%。
二、现阶段无法在公共道路上推广未来将扩大研究规模
但研究人员也表示,这项研究现在还不够完善,无法在公共道路上进行推广,但他们计划扩大研究对象规模,将道路中的行人、自行车等都纳入研究中。此外,他们还打算研究其他在人类之间起作用的机器人系统,例如家用机器人。
▲自动驾驶汽车通过对面来车的驾驶习惯选择何时左转弯
Wilko Schwarting表示,扩大这项研究的范围能够使机器弄清楚不同人类的行为意图,也能更好的理解人类的行为。
人们的性格,处事态度往往会影响到他们的驾驶习惯,这支研究团队正在探索这些行为能否进行量化,并将它们用于自动驾驶汽车。
结语:新研究将会降低自动驾驶事故率
自动驾驶汽车在运行的时候,只能依据计算机的的计算和决策来采取行动。但这就会产生一个问题,计算机无法对人类的行为作出预判,当人类突然做出影响车辆前进的动作或行为时,车辆并不能及时识别出并进行减速。
反过来说,由于人类并不懂自动驾驶车辆的决策机制,人类也不能及时避开自动驾驶汽车,这样就会导致事故的发生。
但麻省理工学院的这项研究将会使自动驾驶系统了解人类的驾驶习惯,将这些因素也加入到机器决策当中,这将有效降低自动驾驶的事故率。

